 |
参考报价:电议 型号:
产地:美国 在线咨询
|
颅脑损伤撞击器系统特点微处理器控制
易用的界面化的软件
撞击速度可调(在0-3m/s和6m/s之间可选)
撞击深度(0-5mm)
撞击后的保持时间(毫秒级)
配备有七种撞击头尺寸(1 到5mm范围内:1、1.5、2、2.5、3、4、5 mm)
撞击的图形表示
完整的接触传感器
360萂范围旋转
多系统配置
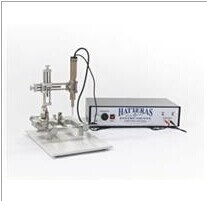
系统组成
由驱动电动机、撞击头、控制单元和铰接支撑臂组成。
1、该驱动电机
是一个直线型的结构,包括电机和操纵臂。撞击时,电机是固定的,动的只是操纵臂,这使得电机能够更有力更耐用的驱动操纵臂。
2、撞击头
撞击头在撞击过程中直接接触目标动物。有圆头的或直角的,用于TBI或SCI的研究。另外,撞击头有7种规格(1 到5mm范围内:1、1.5、2、2.5、3、4、5 mm)。也可以根据用户的要求定制特殊规格的撞击头。
3、控制单元
控制单元是连接软件和驱动电机的接口单元,用于信号传递和补充电能。
4、软件
PinPoint™ 使用GUI图形用户界面软件,可安装在一个标准的PC机上或笔记本电脑上。点击式应用功能允许使用者:
可调节撞击速度、深度和撞击后的保持时间
控制臂的垂直运动
启动撞击
记录主要的数据
浏览、保存和输出数据
另外,撞击结果还可以以图形形式表现,确保优良的品质。
撞击程序
整个撞击过程是一个容易操作的程序,在手术暴露颅脑或脊髓之后:
定位直线型电机
操纵臂可降低到撞击头的目标位置
操纵臂可缩回到启动位置
初始化撞击
不同的系统配置提供不同的放置电机的方法。调整和控制操纵臂一般都是通过软件来完成。
传动装置部分可以装配在立体定位仪上,这使得重复撞击的位置与方向的能力达到**的程度。通过使用脑立体定位仪的操纵臂来达到预设的位置和角度去撞击头骨、脑组织或脊髓,或者作为刺激器撞击别的地方来研究触觉诱发潜能。
操作方法
利用电磁力能够给予1.5m/s或是6m/s的撞击速度。在数字显示器上预先设定好需要的撞击速度,通过一个指轮开关设置保压时间(在撞击器回缩之前持续扩大接触的时间),同时需要设置的有撞击位置和角度。当撞击器延伸时,可以在视频显微镜的辅助下,向下轻轻推进探针,拉回撞击器的末端,通过想要的撞击深度降低撞击器,然后拉下开关,末端会向下推进到延伸的距离,在保压时间内保持电磁力,然后回拉。